Each finger joint has degrees of freedom to support smooth backdrivability. Eliminates “stiff hands”, making operations smoother and more convenient for reinforcement learning(RL) training.
Ultra-fast Reflexes, Snake-like Flexibility
20
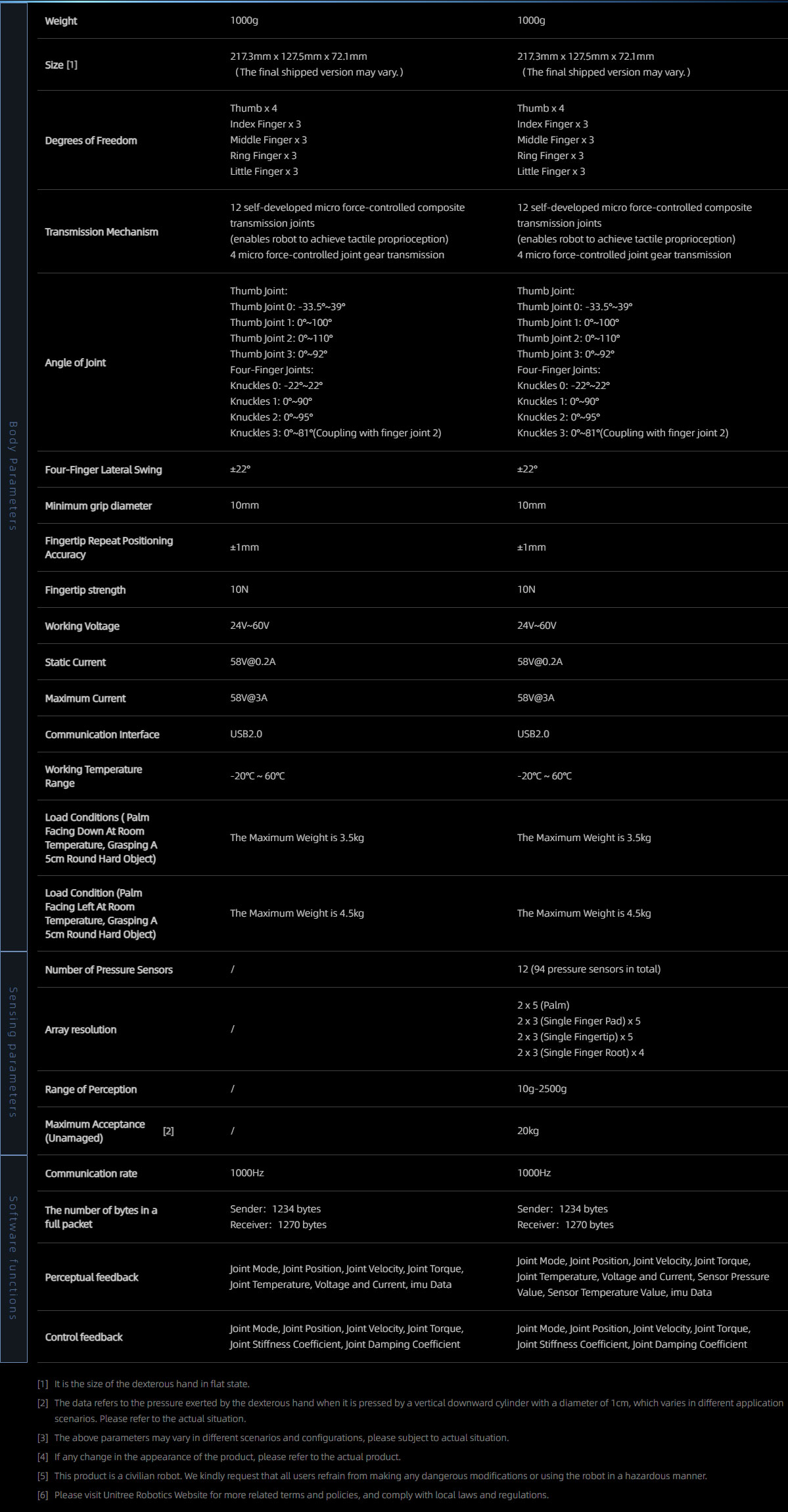
Number of degrees of freedom
5 pieces
All five fingers can be replaced independently
±22°
Four-finger Lateral Swing
Improved grip reliability and adapts more effectively to curved surfaces of grasped objects.
Precise Feedback, Control Every Millimeter
94 tactile sensors per hand;
supports secondary development of tactile algorithms for dexterous hands
High-power density
hollow-cup motor
High-power density drive
and high-precision encoder
Low damping small clearance reducer
Micro-gap design ensures smooth and effortless motion
The rotation axis of joint is closer to the surface, with ultra-small joint gaps. This enables a smoother and more fluid grasp, preventing joint corners from getting stuck on objects.